
As my 4WD slowly evolves, I wanted to think on my next platform.
One of the form that fascinate me is hexapod robots. They quite always looks organics in their moves and it seems that they can be easier to build than full crazy out of price humanoids ;)
Once more, the final push came from Let’s make robot. To be precise, Chopstick junior’s page.
The author, Lumi, has real good tips and tutorials, always finding nice solutions and allows me to think that any material can be used ;)
So it was: I will create some kind of quadrupod, using balsa wood, polymorph and hotglue!
Let’s call it Sticky! I started to cut some light balsa sticks.


Then came the use of polymorph. It’s a bunch of small grains that you first put in hot water.

After a little moment, it became a translucid block.

I just had to mold around sticks to create what I could call tibia for the robot. Polymorph can be modelled again and again: just put it back in hot water.

Of course, I will have to cut some polymorph to allow Sticky to have nicer feet.
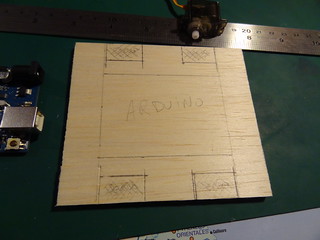
Then, I prepared the plate for the arduino board. Places for the servos were marked.
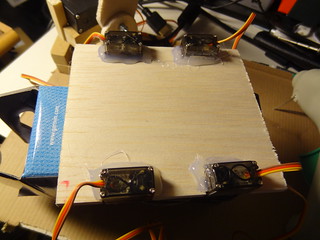
The servos on the platform were fixed using hot glue: quick, strong, fun :)

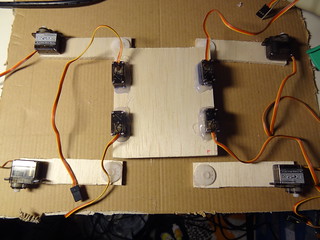
Next part were the femur of the quadrupod. Some balsa wood, hot glue to fix servo horns.

Then fix the femur servo on this.
Once every pieces of legs assembled, I thought the femur was too long. Balsa wood is a little bit too flexible.
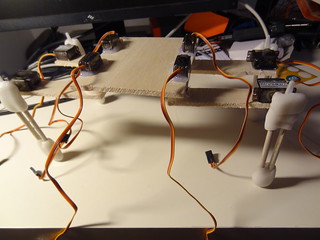
The second issue was that the tibia servo horns were not glued and polymorph was not keeping it under light effort.

So I asked my junior assistant to shorten the femur while I was glueing the tibia horns.
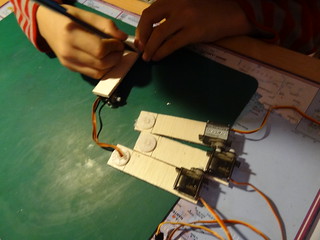
The result was really better:

Unfortunately, I used past all along this post because Sticky had an accident.
One night, with no apparent reason, Sticky decided he had to try thrilling experience: he jumped from the desk. Two femurs were broken, one tibia horn broke the polymorph during the fall.
Am I sad?
You will know it… on my next blog post ;)
Full gallery on flickr as usual.
Comments powered by Talkyard.